
Doelstelling
Het doel was tweeledig
- bepalen hoe het autoverkeer de telnauwkeurigheid beïnvloedde (als dat al het geval was), en
- begrijpen hoe de teller reageert op meerdere fietsen die dicht op elkaar over de sensor rijden.
Methode
Op vrijdag 24 juni werd gedurende twee uur (7.00 - 9.00 uur) een video-opname gemaakt van de tellerlocatie. Deze video werd gebruikt om kruiscontroles uit te voeren met de gegevens van de Metrocount-eenheid voor zowel fout-positieven als fout-negatieven.
Vals-positief is wanneer de teller een fiets detecteert terwijl die er niet is (dit kan bijvoorbeeld te wijten zijn aan een foutieve detectie door een voertuig op de aangrenzende rijbaan).
Vals-negatief is wanneer de teller een fiets die wel aanwezig is, niet detecteert. In de praktijk zal dit waarschijnlijk alleen gebeuren als er twee of meer fietsen vlak naast elkaar rijden.
Het binaire Metrocount-gegevensbestand werd verwerkt met de MCE v3.21-software met het 5720-schema; de standaardparameters voor dit schema werden gebruikt.
Twee fietsers werden gebruikt om de teller te testen onder zware omstandigheden, zoals tijdens inhaalmanoeuvres door fietsers. Het doel van deze tests was om te testen of de teller in staat was om meerdere fietsers correct te classificeren. Tijdens de tests was er een minimaal snelheidsverschil tussen de aangrenzende fietsers, wat het classificatieproces voor de teller nog ingewikkelder maakte.
Resultaten
De algehele tellingsnauwkeurigheid van de RoadPod BP was zeer goed - 202 van de waargenomen 204 fietsers werden geteld (99,0%) over de periode van twee uur. Het is opmerkelijk dat voorafgaand aan de fietsproeven (die hierna worden besproken), die om 8:20 uur begonnen, er 95 fietsers waren geteld in de video en door de teller (met andere woorden, de tellingsnauwkeurigheid was perfect).
Tabel 1: Overzicht telnauwkeurigheid
Methode Aantal fietsers %
Video 204 100%
MetroCount 202 99.0%
Hier wordt aangenomen dat de video de werkelijke situatie weergeeft; hij is slechts door één persoon geanalyseerd, dus verificatie door een tweede persoon zou nodig zijn om deze nauwkeurigheid te verifiëren.
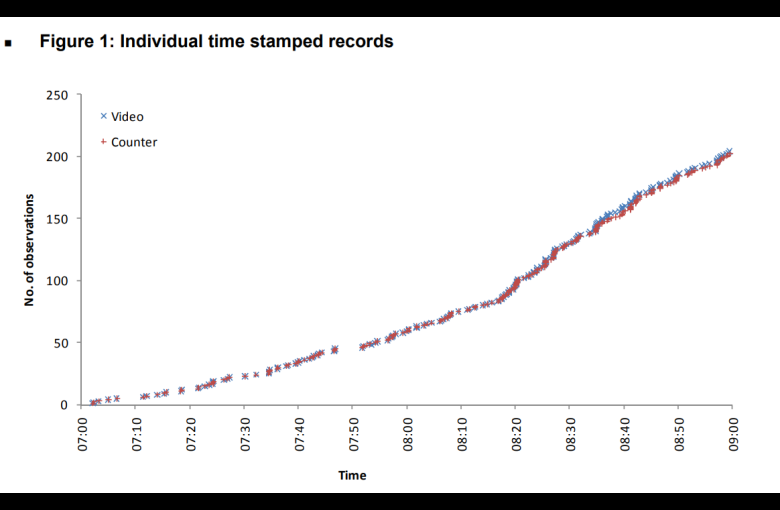
Het is denkbaar dat een combinatie van fout-positieven en fout-negatieven de onjuiste indruk geeft dat het apparaat nauwkeurig is1 . Om dit verder te testen werden de individuele tijdstempelrecords in het MetroCount databestand gekoppeld aan de video. De cumulatieve telling in figuur 1 laat zien dat de waargenomen fietsersbewegingen en de tellergegevens zeer goed overeenkomen. De verschillen die zichtbaar zijn, zijn alleen zichtbaar na ongeveer 8:30 uur, toen de meeste fietsproeven werden uitgevoerd.
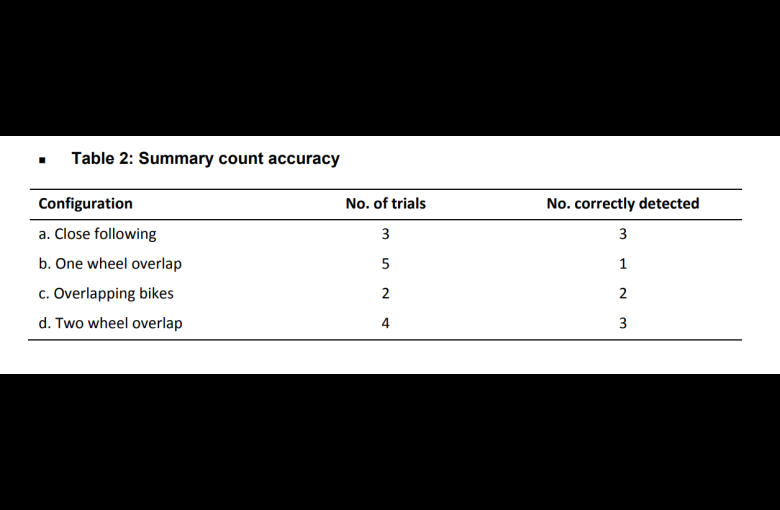
De fietsproeven bestonden uit twee fietsers die in dichte formatie achter en naast elkaar over de teller reden met vergelijkbare snelheden. Het doel van deze tests was om te begrijpen hoe nauwkeurig de MC5720 onderscheid kon maken tussen fietsers onder dergelijke (extreme) omstandigheden. Er werden vier configuraties getest, zoals getoond in Figuur 2. De asdetectiebenadering van de piëzo-elektrische sensor betekent dat er twee 'hits' per fiets worden geregistreerd (één per wiel). Deze tests dienen om de classificatiesoftware in de MC5720 te 'verwarren' door deze te vragen twee, drie en vier hits vlak na elkaar te ontcijferen die twee fietsen voorstellen.




De MC5720 verwerkte de situaties 'kort na elkaar' en 'overlappende fietsen' correct (Tabel 1). Echter, slechts één van de 'één wiel overlap' situaties werd correct geclassificeerd en 1 van de 4 'twee wiel overlap' situaties werd verkeerd geclassificeerd. In het eerste geval detecteerde de teller de aanwezigheid van de tweede fiets niet (met andere woorden, hij telde één fiets terwijl het er twee waren). In het tweede geval werden drie fietsen geteld terwijl het er in werkelijkheid twee waren.
Opgemerkt wordt dat deze situaties ongebruikelijk zijn en dus waarschijnlijk geen wezenlijke invloed hebben op de nauwkeurigheid van de teller, behalve in situaties met hoge volumes, aanzienlijke bosvorming (zoals stroomafwaarts van verkeerslichten) en voldoende fietspadbreedte om naast elkaar rijden te vergemakkelijken. Desalniettemin is het verrassend dat de teller met succes fietsen kan classificeren wanneer beide wielen overlappen, maar veel minder succesvol is met één wiel overlappend.
Conclusie
Deze validatieoefening lijkt het volgende aan te tonen:
- de MetroCount-eenheid biedt een zeer nauwkeurige fietser telling (99% of hoger) op Albert Street onder typische omstandigheden,
- het aangrenzende verkeer heeft geen meetbare invloed op de nauwkeurigheid van de telling (d.w.z. er zijn geen fout-positieven gedetecteerd die kunnen worden toegeschreven aan het autoverkeer), en
- hoewel er enkele problemen zijn gedetecteerd bij het scheiden van fietsers die direct naast de sensor rijden, is dit een extreme gebeurtenis die waarschijnlijk geen invloed heeft op de nauwkeurigheid van de telling in de praktijk.
Gezien dit bewijs lijkt het redelijk om te concluderen dat de Metrocount unit een zeer goed niveau van telnauwkeurigheid biedt in fysiek gescheiden omgevingen zoals Albert Street. Een belangrijk voorbehoud is dat de prestaties op andere locaties kunnen verschillen als de verkeerssamenstelling verschilt (vooral grotere voertuigen), de kwaliteit van het wegdek slechter is of als er andere trillingsbronnen aanwezig zijn (bijv. trams).
Got a great MetroCount story? Share it with us and let the world know the great work you're doing in your community.
