
Objective
The objective was twofold:
- determine how motor traffic affected the counting accuracy (if at all), and
- understand how the counter responds to multiple bicycles riding over the sensor in close formation.
Method
Video was recorded of the counter site for two hours (7 AM – 9 AM) on Friday 24 June. This video was used to cross check against the Metrocount unit data for both false positives and false negatives.
A false positive is where the counter detects a bicycle when there is none (this may, for example, be due to a false detection due to a vehicle in the adjacent traffic lane).
A false negative is where the counter fails to detect a bicycle that is present. In practice, this is only likely to happen if two or more bicycles ride in close proximity (adjacent) to one another.
The Metrocount binary data file was processed with the MCE v3.21 software using the 5720 scheme; the default parameters for this scheme were used.
Two cyclists were used to test the counter under onerous conditions, such as during cyclist overtaking manoeuvres. The purpose of these trials was to test the ability of the counter to correctly classify multiple cyclists. There was minimal speed differential between the adjacent cyclists during the trials, further complicating the classification process for the counter.
Results
The overall count accuracy of the RidePod BP was very good – 202 of the observed 204 cyclists were counted (99.0%) over the two hour period. It is noteworthy that prior to the cyclist trials (discussed next) which started at 8:20 AM there were 95 cyclists counted in the video and by the counter (in other words, the count accuracy was perfect).
Table 1: Summary count accuracy
Method No. of cyclists %
Video 204 100%
MetroCount 202 99.0%
It is assumed here the video represents the actual situation; it was only analysed by one individual, and so verification through a second individual would be required to verify this accuracy.
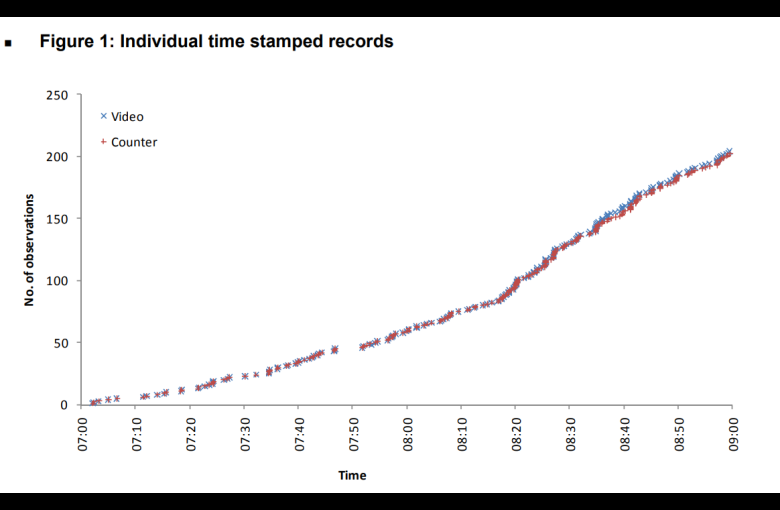
It is conceivable that a combination of false positives and false negatives may give the incorrect impression that the unit is accurate. To test this further, the individual time-stamped records in the MetroCount data file were matched to the video. The cumulative count in Figure 1 demonstrates the very close matching between the observed cyclist movements and the counter data. Whatever differences are apparent are only so after around 8:30 AM when most cyclist trials were undertaken.
The cyclist trials consisted of two cyclists riding in close formation behind and aside one another over the counter at similar speeds. The purpose of these tests was to understand how accurately the RidePod BP (formerly named MC5720) could differentiate between cyclists under such (extreme) conditions. Four configurations were trialled, as shown in Figure 2. The axle detection approach of the piezoelectric sensor means that two ‘hits’ are recorded per bicycle (one per wheel). These trials serve to ‘confuse’ the classification software within the MC5720 unit by requiring it to decipher two, three and four hits in close succession that represent two bicycles.




The RidePod BP (formerly named MC5720) correctly handled the ‘close following’ and ‘overlapping bikes’ situations (Table 1). However, only one of the ‘one wheel overlap’ situations was correctly classified and 1 of 4 ‘two wheel overlap’ situations was misclassified. In the former case the counter failed to detect the presence of the second bike (in other words, it counted one bicycle when there were two). In the latter case three bicycles were counted when there were really two.
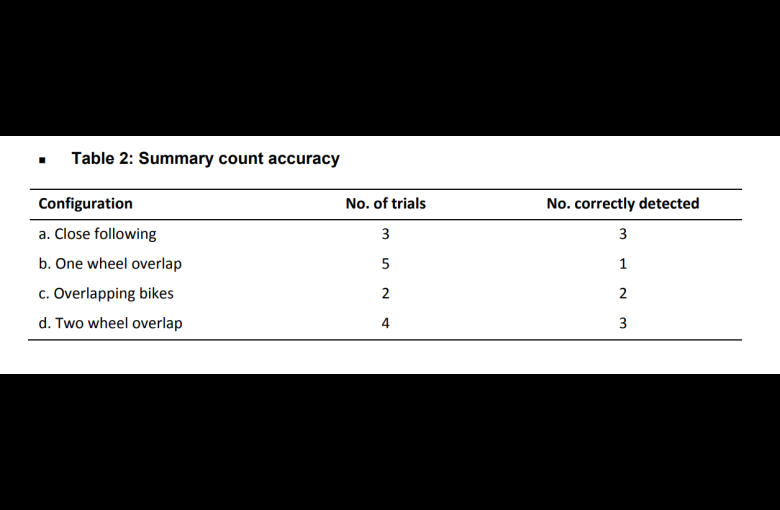
It is noted that these situations represent unusual situations and so are unlikely to have a material impact on counter accuracy except in situations with high volumes, significant bunching (such as downstream of traffic signals) and sufficient cycleway width to facilitate riding adjacent. Nonetheless, it is surprising that the counter can successfully classify bicycles where both wheels are overlapping but be far less successful with one wheel overlapping.
Conclusion
This validation exercise appears to demonstrate the following:
- the MetroCount unit provides a highly accurate cyclist count (99% or greater) on Albert Street under typical conditions,
- the adjacent traffic is having no measurable impact on counting accuracy (i.e. no false positives were detected which could be attributed to motor vehicle traffic), and
- while some issues were detected in separating cyclists where they ride directly adjacent over the sensor this is an extreme event that is unlikely to affect practical counting accuracy.
Given this evidence, it appears reasonable to conclude that the MetroCount unit provides a very good level of counting accuracy in physically segregated on-road environments such as Albert Street. A significant caveat is that performance at other sites may differ should the traffic mix differ (particularly larger vehicles), the road pavement quality be worse or other vibration sources be present (e.g. trams).
Got a great MetroCount story? Share it with us and let the world know the great work you're doing in your community.
